DIY四軸飛行器LDSLITE 250
週六到台北參加了一場翔探科技舉辦的四軸飛行器組裝的工作坊,組裝的機型是他們公司開發的LDSLITE250,用的是他們自己研發的飛控版(LDSLITE馬達驅動載板),還有他們自己研發的遙控器板-PAW 輸出輸入載板
其他的硬體都是現成就有的,例如
- 250mm四旋翼骨幹、馬達、槳
- 560mAh的鋰電池
- Arduino pro micro
- NRF24L01 2.4Ghz 無線模組
課程前先有旋翼機的基本介紹,像是旋翼機和直昇機的比較,雖然直昇機的速度比不上一般飛行機,但是它能夠垂直起降的特點是大勝一般飛行機的。
多軸旋翼機比起直昇機穩定得多,強健度比單旋翼好,但因馬達多,比較耗電。
我對旋翼機的第一印象就是印度電影-三個傻瓜,裡頭一個學生研發的作品。記得第一次看到的時候,覺得真是高科技的東西啊,一定是很貴的東西吧,不過過了幾年目前居然也有數百元就買得到的迷你四軸旋翼機。
旋翼機的技術整合非常多,包括
- 無線通訊(通訊協定、天線設計、天線理論、編碼技術)
- 飛航控制(Sensor Fusion、RTOS實時作業系統、資料結構、作業系統、ESC電子穩定控制系統)
- 電子變數控制(無刷有刷控制、電路設計)
- 馬達(機構設計、電機設計、材料科學、有限元模擬)
- 旋翼(機構設計、熱流設計、流體力學、材料科學、熱流模擬)
- 機體結構(接構設計、配重、應力模擬)
- 影像系統
如果是要從零打造起,恐怕不可能用個一天工作坊來完成。
下一世代的無人機可能有電腦視覺自動控制、人臉辨識...。用旋翼機來辨識人臉的利基在於由於辨識人臉需要正對鏡頭,如果裝在無人機的鏡頭上,就可以自主移動攝影機和鏡頭去拍攝人臉,這比起固定型的攝影機好太多了。
想像有個小偷要偷竊,如果是過去,那小偷只要知道固定型攝影機在哪,閃來閃去就可以但是現在可以發展呈無人機透過人體感測發現有人進來,於是起飛進行多角度的拍攝與人臉辨識。
無人機在的應用包括農業、保安、緊急救護、物流、軍事、監控。這其實也是我想玩玩無人機的原因之一,我想用無人機進行一些空中拍攝的任務,還有進行空拍量測的事情。
這次學習的LDSLITE250,因為都已經模組化設計,許多硬體都已經整合在主板上,所以只要花一個小時左右把硬體組裝好,再來就把遙控器和飛行器的燒錄進去就可以了。其他就是要根據飛行狀況微調PID,這是比較細節的部份。
這台的起飛重量小於100g,旋翼轉速也比較慢,聽說也不容易撞傷就是。預留掛載重量約150g,可以加掛一些東西,像是感測模組及通訊模組。
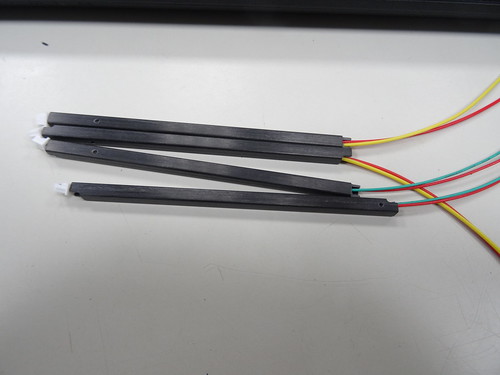
硬體的部份擺出來有這些

先組裝馬達,套上齒輪

裝上馬達架、把線拉出來

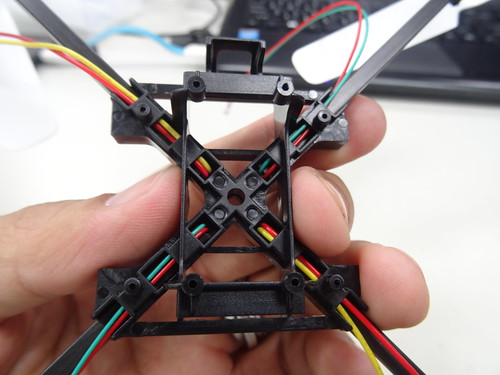
電線穿過四軸
軸和馬達架相連

把四軸和主體結合
加上槳,再鎖上飛控版,這樣幾乎就完成了

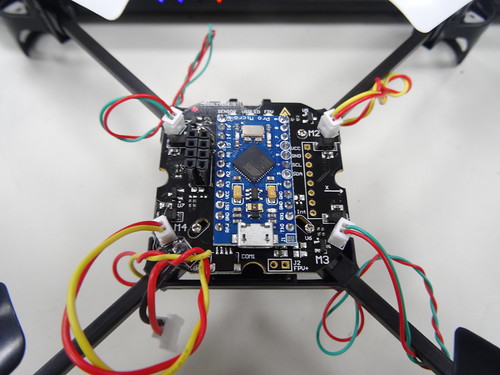
硬體組裝很簡單,熟練的話,我覺得半個小時以內應該可以組好。軟體部份其實就是把現成的檔案燒錄進去就行了,比較要注意的是要特別設定遙控器和主板的頻道和Address,設錯的話就不能遙控了,另外就是PID的參數調整,這點就要花點時間理解和調整了。